
Design of the Proplusion & Control System of an A.U.V.
Client: McGill Robotics - Supervisor: Professor Meyer Nahon
Mechanical Engineering Capstone Project
“Team project work typically involving the design, fabrication, verification, and application of a mechanical device or system”
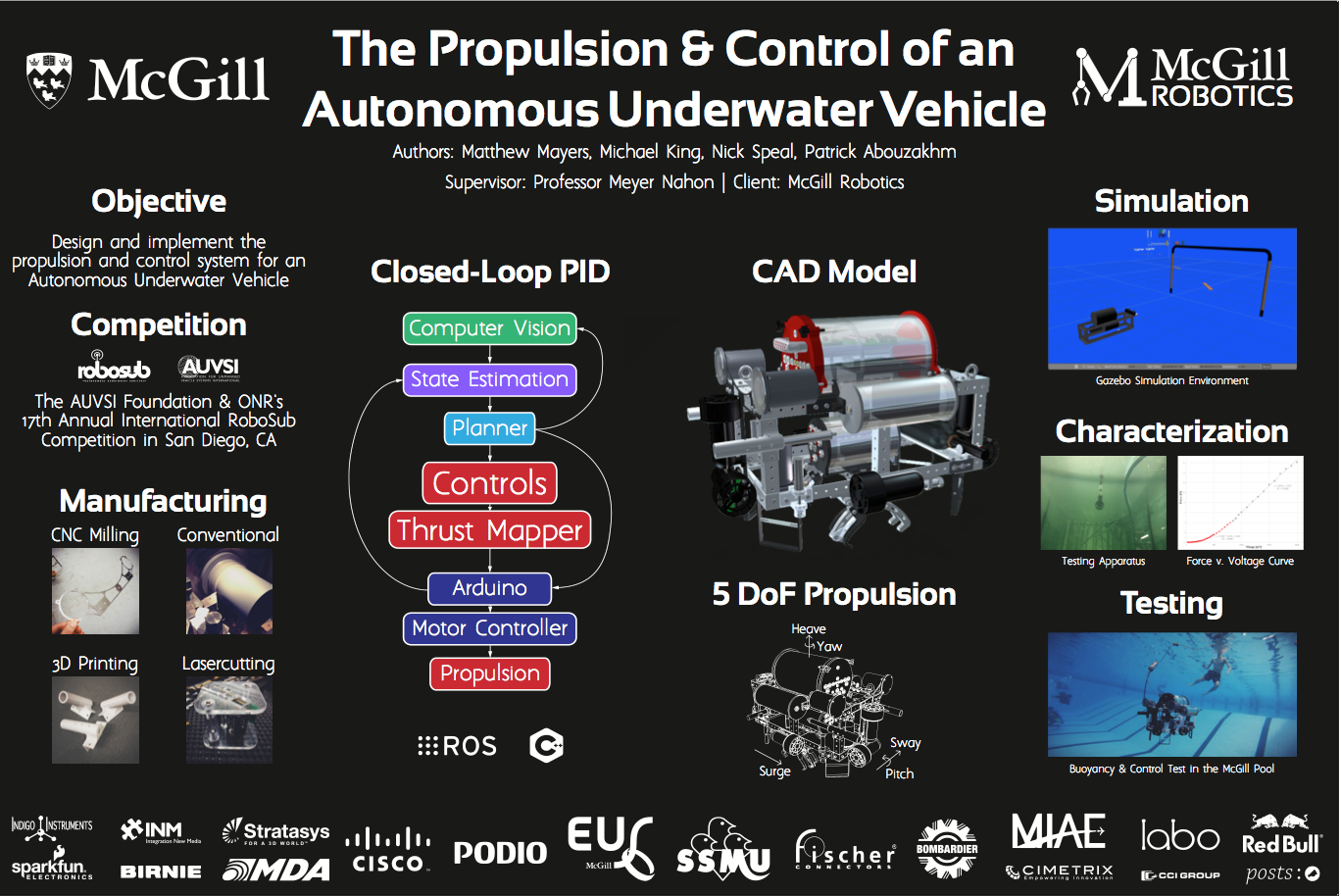
For my senior capstone project, I worked with Nick Speal, Patrick Abouzakhm, and Matthew Mayers to design a 5-DOF control system and propulsion for the autonomous underwater vehicle being built by McGill Robotics. We were responsible for dynamically modeling the robot, choosing an appropriate style of control, simulating the controls in an underwater environment, and implementing it into the vehicle. Using an iterative approach, we made many assumptions to create a simple version, test it, expand upon the assumptions, and repeat until we had a system with precision that met our needs. The system was written in C++ and used ROS to integrate with the planner, state estimation, and motor control of the software system. The system was proven to be incredibly successful, as the vehicle performed beyond our expectations at competition in San Diego.
As I was also the mechanical division leader at McGill Robotics, I had the responsibility of leading the mechanical design and manufacturing of the vehicle and continued to work on the control system until the competition in the end of July.
I’ve written details about the McGill Robotics team and their competition here.